
")
SERBOT多元化吊装系统
SERBOT高楼清洗机器人多元化吊装系统
为了让SERBOT高楼清洗机器人更好的在各种结构楼顶被轻松吊装,海特林科技提供多种临时固定装置,亦可以按需定制。临时固定装置主要由两部分组成:悬臂架和锚定绳,如下图展示,锚定绳是临时固定装置的重要组成部分,避免在故障发生时悬臂架从楼顶坠落。
锚定绳必须与锚定栓固定。根据SAIA规定,锚定栓的承重能力必须大于2268公斤。此外,锚定绳的最低作业强度必须大于等于牵引绳的作业强度。
锚定绳作业强度≥牵引绳作业强度
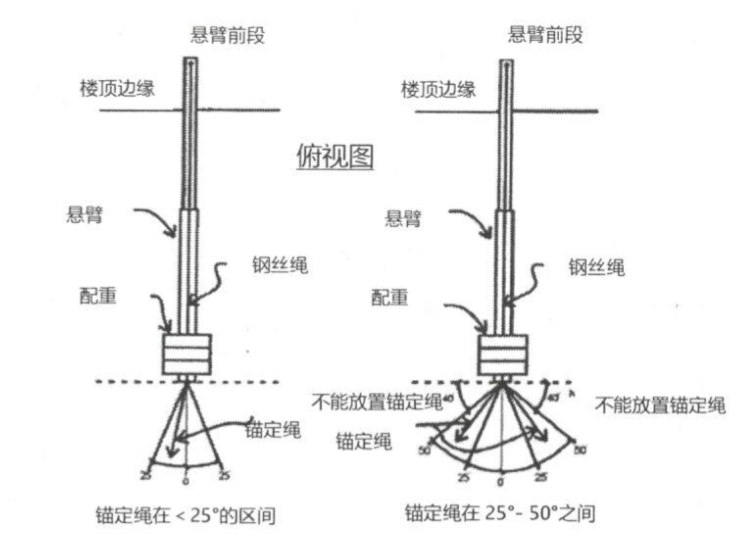
锚定栓的另一个设计重点是锚定栓的设置间距。锚定绳必须与悬臂架保持在同一水平线上并与锚定栓固定。悬臂架的中线与锚定绳的夹角小于等于25度时,可以只用一条锚定绳与一个锚定栓绑定;悬臂架的中线与锚定绳的夹角大于25度时,必须于中线两旁使用两条锚定绳与两个锚定栓分别固定;使用两条锚定绳固定时,悬臂架的中线与两边任意一条锚定绳的夹角不能大于50度,如图;
假如无法使用锚定栓或需要采用其他固定方式,可以采用以下三种方案之一替代锚定栓。方案一,平顶屋顶可以使用固定钩;方案二,将锚定绳与楼顶建筑固定;方案三,在楼顶的女儿墙安装夹具。
假如只有将楼顶公寓可替代锚定栓,则需要使用12.7毫米钢丝绳缠绕楼顶公寓,并用钢丝夹和卡环(必要时可使用卸扣)连接。因为在使用时,楼顶建筑物将起到承力锚作用。钢丝绳必须紧密缠绕建筑物,否则会产生过多冲击载荷。
假如有足以承重的女儿墙,则可以使用夹具代替锚定栓。
除了锚定栓和锚定绳之外,悬臂架的另一个关键是悬臂本身。SERBOT可根据施工条件提供相应方案,主要为三大类:悬臂架、女儿墙夹以及挂钩。
SERBOT悬臂架
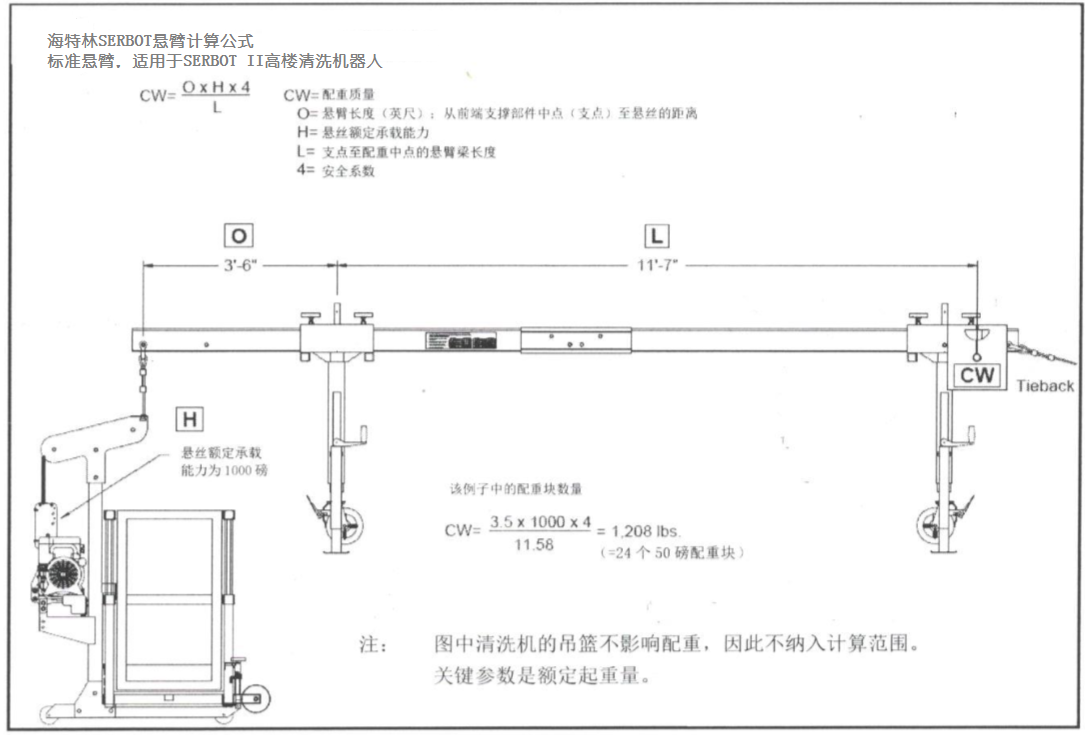
海特林科技提供多种规格的悬臂架,在特殊情况下亦可按需定制。现在以海特林的标准悬臂架的规格,供楼顶作业评估参考。此悬架运用在SERBOT II高楼清洗机器人上。
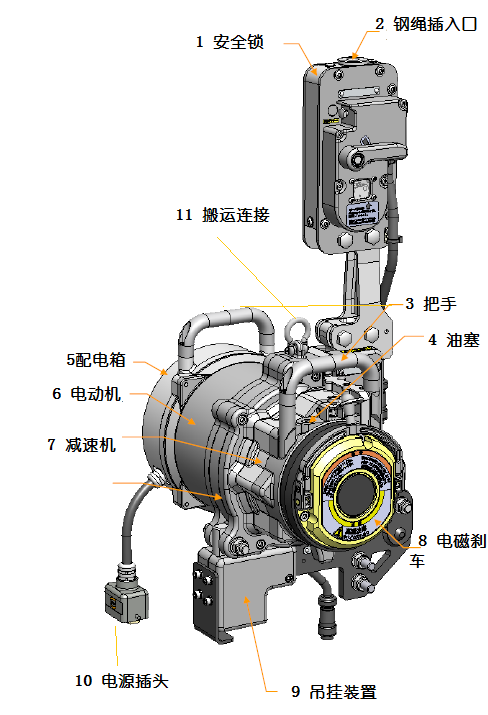
海特林SERBOT悬臂架都是由多个组件组装而成,非常的轻松的运输到楼屋顶,然后可以快速的安装或快速的拆卸。
海特林SERBOT悬臂架采用了SERBOT特殊卷扬机;(有电动和气动)
此系列卷扬机具有体积小:264 mm (高) × 314 mm (寬) × 95 mm (深)
荷载800KG时的自身重量:45KG (重量非常轻)
海特林的SERBOT特殊专利电动卷扬机是国内通等参数卷扬机的1/5的体积和重量
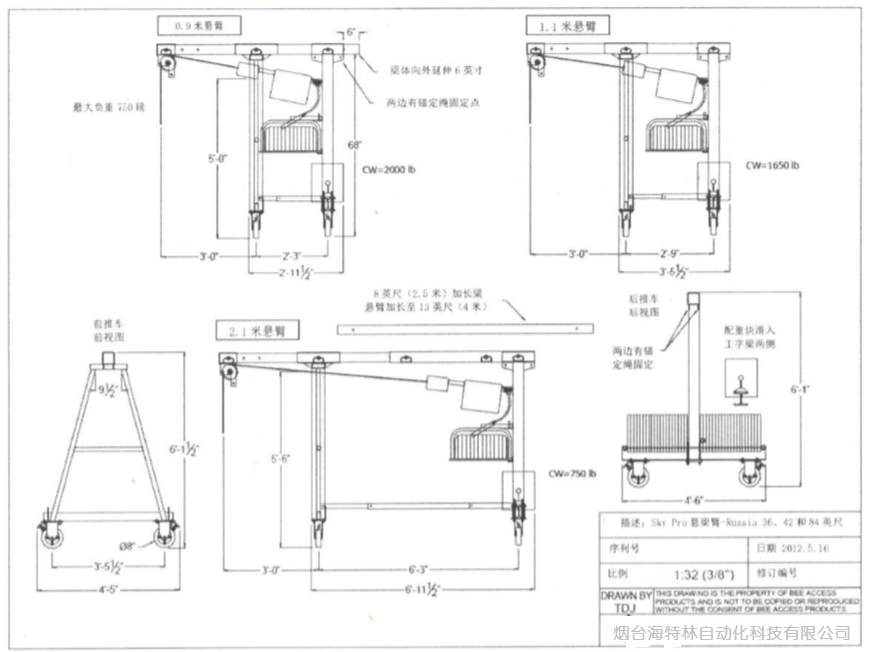
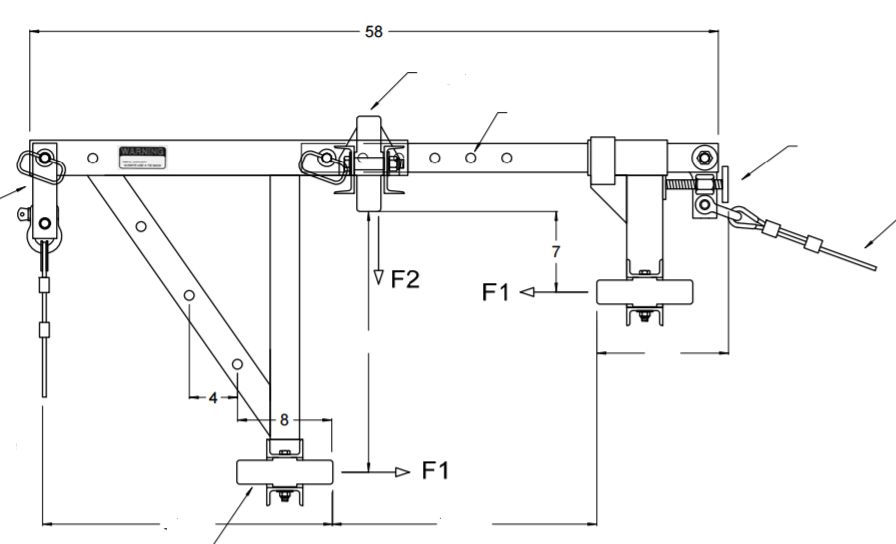
海特林在销售我们的高楼清洗机器人时,针对高楼楼顶不同结构,为不同客人定制特殊悬臂架,下图是我们为客人定制的悬臂架。因为建筑楼顶的女儿墙和障碍物之间存在一小段距离,所以臂长增加,导致配重重量剧增至907KG;此外在安全系数为2.5的情况下,靠近女儿墙的前轮所承受的反作用力增至8kN或4kN每车轮。鉴于该悬臂梁对楼顶结构造成巨大压力,安装前需要考虑楼顶结构的承受能力,一般需要建筑工程师进行评估。
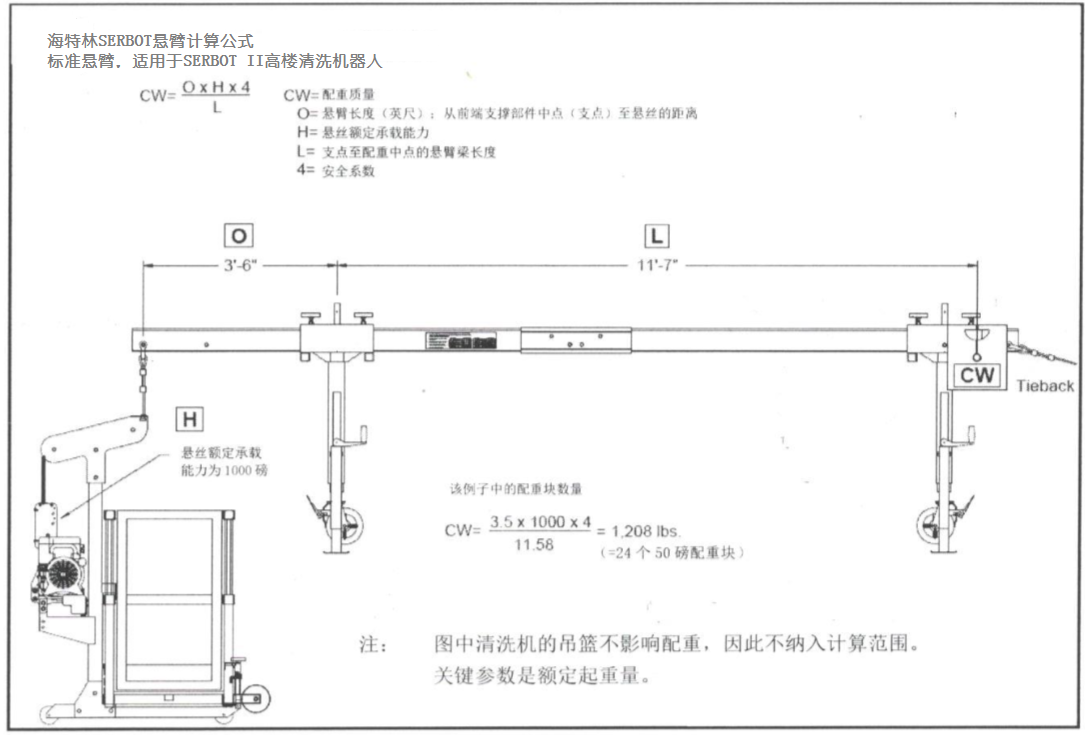
为了方便计算悬臂架配重和前轮所承受的反作用力,我们必须计算通过对应参数。我们的SERBOT I高楼清洗机器人及其其它系列高楼清洗机器人的建议安全系数2.5;如果是人工操作环境下,建议安全系数为4。举例计算公式:
SERBOT I高楼清洗机器人标准悬臂架之一,此悬臂架与SERBOT II清洗机器人的悬臂架类似,只是前端设有分叉悬臂,多段航空铝材组合,轻松运输,快捷安装与拆卸。如图

SERBOT IImini高楼清洗机器人的悬臂架还采取了一种女儿墙夹具方式。为迎合清洗的特殊要求,海特林科技开发了数款女儿墙夹具,进一步提高了海特林高楼清洗机器人的适用性。女儿墙夹具的规格多样化。使用夹具清洗外墙是一个非常可行的方案。
采用女儿墙夹具悬吊时,必须对女儿墙的强度测算。
更多的吊装系统,请联系我们!全部图纸、文字内容均为海特林科技所有,盗图非法转载者;海特林必追究法律责任!
为了让SERBOT高楼清洗机器人更好的在各种结构楼顶被轻松吊装,海特林科技提供多种临时固定装置,亦可以按需定制。临时固定装置主要由两部分组成:悬臂架和锚定绳,如下图展示,锚定绳是临时固定装置的重要组成部分,避免在故障发生时悬臂架从楼顶坠落。
锚定绳必须与锚定栓固定。根据SAIA规定,锚定栓的承重能力必须大于2268公斤。此外,锚定绳的最低作业强度必须大于等于牵引绳的作业强度。
锚定绳作业强度≥牵引绳作业强度
锚定栓的另一个设计重点是锚定栓的设置间距。锚定绳必须与悬臂架保持在同一水平线上并与锚定栓固定。悬臂架的中线与锚定绳的夹角小于等于25度时,可以只用一条锚定绳与一个锚定栓绑定;悬臂架的中线与锚定绳的夹角大于25度时,必须于中线两旁使用两条锚定绳与两个锚定栓分别固定;使用两条锚定绳固定时,悬臂架的中线与两边任意一条锚定绳的夹角不能大于50度,如图;
假如无法使用锚定栓或需要采用其他固定方式,可以采用以下三种方案之一替代锚定栓。方案一,平顶屋顶可以使用固定钩;方案二,将锚定绳与楼顶建筑固定;方案三,在楼顶的女儿墙安装夹具。
假如只有将楼顶公寓可替代锚定栓,则需要使用12.7毫米钢丝绳缠绕楼顶公寓,并用钢丝夹和卡环(必要时可使用卸扣)连接。因为在使用时,楼顶建筑物将起到承力锚作用。钢丝绳必须紧密缠绕建筑物,否则会产生过多冲击载荷。
假如有足以承重的女儿墙,则可以使用夹具代替锚定栓。
除了锚定栓和锚定绳之外,悬臂架的另一个关键是悬臂本身。SERBOT可根据施工条件提供相应方案,主要为三大类:悬臂架、女儿墙夹以及挂钩。
SERBOT悬臂架
海特林科技提供多种规格的悬臂架,在特殊情况下亦可按需定制。现在以海特林的标准悬臂架的规格,供楼顶作业评估参考。此悬架运用在SERBOT II高楼清洗机器人上。
海特林SERBOT悬臂架都是由多个组件组装而成,非常的轻松的运输到楼屋顶,然后可以快速的安装或快速的拆卸。
海特林SERBOT悬臂架采用了SERBOT特殊卷扬机;(有电动和气动)
此系列卷扬机具有体积小:264 mm (高) × 314 mm (寬) × 95 mm (深)
荷载800KG时的自身重量:45KG (重量非常轻)
海特林的SERBOT特殊专利电动卷扬机是国内通等参数卷扬机的1/5的体积和重量
海特林在销售我们的高楼清洗机器人时,针对高楼楼顶不同结构,为不同客人定制特殊悬臂架,下图是我们为客人定制的悬臂架。因为建筑楼顶的女儿墙和障碍物之间存在一小段距离,所以臂长增加,导致配重重量剧增至907KG;此外在安全系数为2.5的情况下,靠近女儿墙的前轮所承受的反作用力增至8kN或4kN每车轮。鉴于该悬臂梁对楼顶结构造成巨大压力,安装前需要考虑楼顶结构的承受能力,一般需要建筑工程师进行评估。
为了方便计算悬臂架配重和前轮所承受的反作用力,我们必须计算通过对应参数。我们的SERBOT I高楼清洗机器人及其其它系列高楼清洗机器人的建议安全系数2.5;如果是人工操作环境下,建议安全系数为4。举例计算公式:
SERBOT I高楼清洗机器人标准悬臂架之一,此悬臂架与SERBOT II清洗机器人的悬臂架类似,只是前端设有分叉悬臂,多段航空铝材组合,轻松运输,快捷安装与拆卸。如图
SERBOT IImini高楼清洗机器人的悬臂架还采取了一种女儿墙夹具方式。为迎合清洗的特殊要求,海特林科技开发了数款女儿墙夹具,进一步提高了海特林高楼清洗机器人的适用性。女儿墙夹具的规格多样化。使用夹具清洗外墙是一个非常可行的方案。
采用女儿墙夹具悬吊时,必须对女儿墙的强度测算。
更多的吊装系统,请联系我们!全部图纸、文字内容均为海特林科技所有,盗图非法转载者;海特林必追究法律责任!